Для многих из нас очень важно иметь в своем распоряжении оборудование, способное выводить качественную продукцию в кратчайшие сроки, при этом основным параметром при выборе остается соотношение цены и технического оснащения подобного устройства.
В отличие от систем, осуществляющих линейное перемещение блока печатающих голов по оси X, аналогичные системы по оси Y выглядят менее принципиальными, и в этом нет ничего удивительного, ведь вся «магия» происходит именно при горизонтальном перемещении. Тут и высокие линейные скорости, за которыми уже все тяжелее поспевать пиковым частотным показателям печатающих голов в режиме переменной капли, и неимоверная скорость регистрации положения блока печатающих голов… В то же время происходит передача колоссальных объемов данных в реальном времени для формирования идеально выверенного паттерна предсказуемо адресованных элементарных элементов (чернильных капелек) для формирования действительно качественного изображения без зернистости и прочих нежелательных артефактов.
Тут на помощь приходят сразу множество систем, которые обязаны работать сообща. Аэродинамические свойства конструкции блока печатающих голов нивелирует сопротивление воздушного потока, неизбежно формирующегося за счет высоких скоростей перемещения голов и вносящего ощутимое влияние на предсказуемость точки нанесения чернильных капель на носитель. Линейные магнитные шкалы позволяют вне зависимости от условий эксплуатации надежно передавать импульсы на энкодерный сканер. Сам высокочастотный энкодерный сканер способен с высокой частотой передавать данные об актуальном местоположении блока печатных голов и сбрасывать пакеты цифровых данных на печатающие головки. Кроме того, управляющая электроника способна мгновенно с помощью новейших интерфейсов конвертировать растровую информацию в сигналы для вывода изображения на носитель.
Но почему же движение портального модуля так же важно? Несмотря на то, что от него требуется совсем немного, а именно движение с точно выверенными интервалами и надежность, тем не менее, если он не будет работать корректно, то и предполагаемого качества печати достигнуть будет невозможно. В худшем случае из-за не оптимальной конструкции оборудование будет подвержено хроническому сервисному обслуживанию с его периодическими простоями.
На планшетных индустриальных УФ-принтерах в последнее время используются в основном два типа передач для преобразования вращательного движения двигателя в поступательное движение портального модуля вдоль оси: зубчатая ременная и шарико-винтовая пара (ШВП).

Система зубчато-ременной подачи
Зубчатая ременная передача используется достаточно давно на многих планшетных принтерах. К основным преимуществам можно отнести высокую скорость перемещения, а также неприхотливость в штатном обслуживании, так как подобные ремни почти не боятся пыли и других инородных мелкофракционных скоплений, имеют более низкую себестоимость по сравнению с ШВП. К минусам относятся низкий класс точности, поскольку зубчатые ремни имеют предрасположенность к растяжению и выработке зубьев. Частично эту проблему решают металлические или стекловолоконные корды, проложенные внутри ремня, и наружное нейлоновое покрытие. Но когда для достижения исходного качества даже погрешность в 0.1 мм на каждом проходе является критической, о выводе изображения без эффекта небольшой зернистости придется забыть. Ситуацию спасает возможность регулировки натяжных зубчатых роликов с последующей компенсацией в управляющей системе, но в большинстве случаев данная процедура выходит за рамки штатного обслуживания принтера и требует участия квалифицированного инженера. Стоит сказать, что данная система тем больше подвержена растяжению, чем больше дистанция хода портального модуля и, соответственно, больше длина ремня, а в совокупности с большим весом портального модуля эффект растяжения увеличивается гораздо быстрей. Зубчатая ременная передача хорошо подходит для легких принтеров с небольшим осевым ходом, а также на полноформатных принтерах, оборудованных печатными головами со средним и крупным объемом капли, где принципиальна, скорее, производительность принтера, нежели качество выводимой продукции.

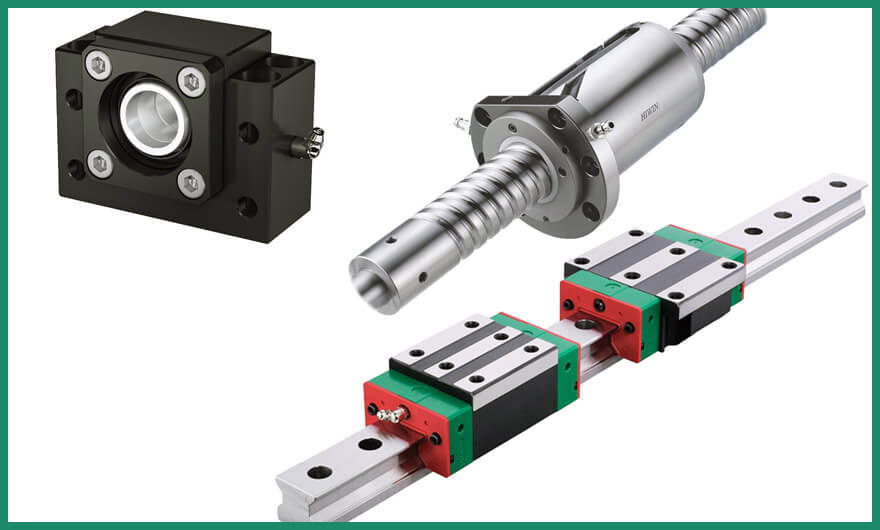
Узел ШВП в разрезе

Блок поддержки ШВП
Шарико-винтовая пара используется не только на планшетных принтерах, но и на целом ряде моделей высокоточного оборудования. Из плюсов явно выделяются высокая точность, КПД (80-90%) и износостойкость. Из минусов можно выделить небольшую скорость движения по оси Y при печати и возврат в нулевую точку координат. Но в конструктиве принтера это нивелируется за счет торможения и акселерации блока печатающих голов - портал совершает перемещение в нужную точку без потери времени, даже если ширина прохода составляет порядка 70 мм, а в возврате в нулевую точку при использовании ШВП нет необходимости, т. к. повышенная точность позволяет печатать в реверсе, по тем же самым координатам без смещения в сторону нулевой точки. К слову, данная система требует периодического ухода, она должна в штатном порядке обслуживаться вместе с линейными направляющими не реже одного раза в месяц - процедура производится оператором принтера согласно штатному расписанию. Подобная система используется в тяжелых индустриальных принтерах с большим массивом печатающих голов и тяжелым портальным модулем, обеспечивая высокую точность и скорость печати. Шарико-винтовая пара увеличивает цену принтера, зато позволяет снизить стоимость его владения.
Системы регистрации положения портального модуля позволяют координировать передвижение по оси Y, зачастую нивелируя неточности, связанные с механической составляющей, и позволяют максимально точно организовывать его (портального модуля) движение. Существуют два типа распространенных систем регистрации: линейные оптические и линейные магнитные.

Линейные подшипники и направляющий профиль
Линейные оптические системы состоят из растровых шкал, расположенных по оси движения портального модуля с одной либо двух сторон, а также оптического сканера. Они позволяют осуществлять в режиме реального времени регистрацию местоположения портального модуля на протяжении всей его длины хода. Линейные оптические системы способны с высочайшей точностью доводить портальный модуль в нужную координату, что избавляет от некоторых сторонних факторов, связанных с перекосом портала по оси X. Минусом данной системы является необходимость частого обслуживания - очистка от пыли и смазочных материалов обязательна, ведь если сканер не считает шкалу корректно, мы получим либо смещение портала, либо потерю координаты и отказ оборудования от завершения печати, что в любом случае приведет к отбраковке носителя с запечатанным заданием.

Магнитная система регистрации положения
Магнитные системы работают по такому же принципу что и оптические, но вместо обработки растровой шкалы используют электромагнитное поле для определения координаты портала вдоль оси Y. Они являются крайне надежными и используются в сферах производства с экстремальными условиями эксплуатации оборудования. Магнитные системы позволяют точно обрабатывать сигнал даже если магнитная шкала загрязнена смазочными материалами, пылью и другими инородными скоплениями. Хотя магнитная система регистрации положения портального модуля имеет менее низкое разрешение, чем оптическая система, этого вполне достаточно для точной работы узлов принтера даже при передвижении по оси X. Особенностью принципа работы данной системы является возможность установки сканера на высоту вплоть до 5 мм от сканируемой шкалы без потери точности регистрации и передачи данных, что позволяет защитить от выхода из строя сам сканер в случае нахождения на шкале инородного предмета.
Две эти системы работают сообща с угловым энкодером самого двигателя, что позволяет системе в целом не только осуществлять точное движение по оси Y, но и обрабатывать сигналы от самого двигателя, что предотвращает его перегрузку и способствует более стабильной работе в целом.

Металлизированная оптическая система регистрации положения
Системы перемещения по оси Y могут оборудоваться одиночным либо сдвоенным приводом. В системе с зубчатыми ремнями предпочтительно использовать два двигателя, так как нагрузки при линейном движении гораздо выше, нежели с использованием ШВП. Также два двигателя используются на ШВП с узким профилем, что гораздо надежнее одиночного двигателя. Преимущество сдвоенного двигателя выражается в независимом приводе на каждую из движимых сторон портального модуля, что должно корректировать перекос портала. Но, к сожалению, большинство систем управляет двигателями независимо только на стадии первоначальной инициализации, при включении принтера, где портал выравнивается на концевых датчиках в нулевой позиции. Также система, имеющая независимый привод в реальном времени, допускает перекос из-за некорректной обработки данных с линейного энкодера, что опять же требует начальной инициализации по концевым датчика. В этих двух случаях есть вероятность не только потери времени, но и отбраковки запечатываемого носителя. В системах с широкими профилями ШВП и массивными линейными направляющими, где портал закреплен и точно юстирован на заводе, нет надобности в установке сдвоенной системы подачи портала - синхронное передвижение с одиночного серводвигателя, гораздо надёжнее справится с данной задачей в условиях когда конструктивно нет возможности для перекоса портала.

Серводвигатель и сервоконтроллер
На Российском рынке представлено множество моделей индустриальных УФ-принтеров с разными конструктивными решениями - нет плохих или хороших, есть решения под задачи, условия эксплуатации, загрузку оборудования, квалификацию и доступность операторских кадров, ассортимент носителей под вывод печати и технологические процессы по пред и пост обработке выводимой продукции. Также стоит принимать во внимание стоимость самого оборудования и его владения в течение периода эксплуатации. Данная статья лишь поверхностно проливает свет на часть сложной инфраструктуры цифрового струйного индустриального УФ-принтера. И всё же я надеюсь, что она поможет в выборе оборудования, которое необходимо именно Вам!

Ведущий инженер по системам цифровой печати компании 3t Group
Константин Чулошников.